Rhythmic Tasks: A New Task Model with Continually Varying Periods for Cyber-Physical Systems
1. The paper describes a new task model for engine tasks where the time between task releases varies depending on the speed at which the engine is running. Is it possible to describe such tasks as periodic, sporadic or aperiodic? Justify your answer.
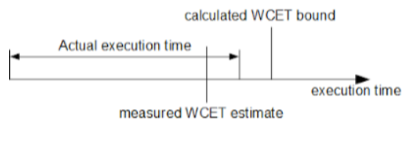
2. In §I of the paper, the authors discuss a specific example of a periodic task with period 140 ms and worst case execution time 60 ms running alongside an engine task with variable period between 10 ms and 120 ms. Show that, if the worst case execution time of the engine task is 4 ms, the system is mschedulable.
3. Consider a second engine with lower maximum speed so that its minimum engine task period is 55 ms. According to the same test, what would be the maximum computation time allowed for the system to be schedulable? Show your working.
4. In §IV of the paper, a new schedulability test for rhythmic (a.k.a., engine) tasks is proposed, for the case where there is one rhythmic task and one periodic task. According to the new schedulability
test, what is the maximum execution time for the engine task for the engine from question 2 in steady state? What is it for the engine from question 3? Show your working and comment on the result.
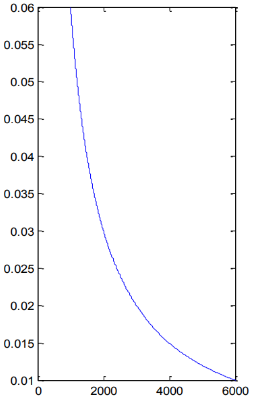
5. Plot the maximum execution time for the engine task against the period, at steady state, according to (i) the utilisation bound test and (ii) the new schedulability test. Discuss the results.
6. Consider the case that the engine from question 2 accelerates at a rate of α = 0.3 for nα = 1 job release. If the computation time of the engine task is constant, is the system schedulable during and after acceleration? Show your working.
GET WELL FORMATTED ONLINE ASSIGNMENT SOLUTION DOCUMENT WITH NO GRAMMAR AND SPELLING MISTAKES AT EXPERTSMIND.COM!
Question 1
In response to some events which might be in the form of internal or external, real time tasks will generate. Each time an event occurs, it usually influences the task that has been handled by the events to run. Thus, we see that these real time tasks have the tendency to recur for a large number of times at various time points and it purely depends on the occurrence times. In addition, there are chances that these real time tasks recur at random instant too. Let us consider the example of temperature sensing task usually occur in a chemical plant which will definitely recur without any instance in a certain period and this might happen mainly due to the samples of the temperatures which will be taken periodically and thus, there will be an interruption in the device that was used for task handling and thus resulting in recur at random instants. Instance happens when each task recurs and the first instance occur when the task recur for the first time
When a tasks repeats after a fixed interval of time, then it is called periodic task. The fixed time where we can see that the periodic tasks tend to recur are usually termed as clock interrupts. For this specific reason, periodic tasks are also called as clock – driven tasks. Period of the tasks is also defined as the tasks which repeat after a fixed amount of time
On the other hand, when the tasks recur at random instants, then it is called sporadic tasks
There is no difference between aperiodic tasks and sporadic tasks as both tasks will arise at tasks which occur at random instants. However, for aperiodic tasks, there is a chance that the minimum separation between two consecutive tasks be 0. In other words, we can say that, in aperiodic tasks, there is a chance that two or more events will occur at same time
Thus, we see that the statement “new task model for engine tasks where the time between task releases varies depending on the speed at which the engine is running” is an example of periodic tasks
AT EXPERTSMIND, FIND TOP QUALITY WRITERS AND QUALIFIED TUTORS UNDER THE ONLINE ASSIGNMENT HELP SERVICE!
Question 2
It is found that the conventional model periodic task seems to be inadequate for handling tasks which is related to cyber – physical systems which is mainly due to its pessimism when are usually linked with common schedulability analyzes. When a tasks repeats after a fixed interval of time, then it is called periodic task. The fixed time where we can see that the periodic tasks tend to recur are usually termed as clock interrupts. For this specific reason, periodic tasks are also called as clock – driven tasks. Period of the tasks is also defined as the tasks which repeat after a fixed amount of time
A system is said to be schedulable when we found that every thread always meets its deadline. In our study, it is found that the worst case execution time of the engine task is 4 ms
Here, we see that j ? hp (i)
Thus, we see that
Thus, we see that the periodic tasks do not meet its deadline and therefore it should not be schedulable system
EXPERTSMINDS.COM ACCEPTS INSTANT AND SHORT DEADLINE ORDERS FOR EVERY ASSIGNMENT – ORDER TODAY FOR EXCELLENCE!
Question 3
For second engine, the minimum engine task period = 55 ms
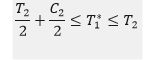
The minimum flexion point lies in the range
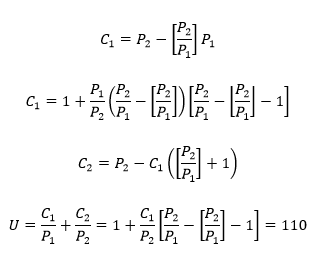
Here, we see that
Thus, we see that the maximum computation time allowed for the system to be schedulable is 110 ms
DO YOU WANT TO EXCEL IN YOUR ACADEMIC ASSIGNMENTS? HIRE TRUSTED TUTORS FROM EXPERTSMINDS AND ACHIEVE SUCCESS!
Question 4
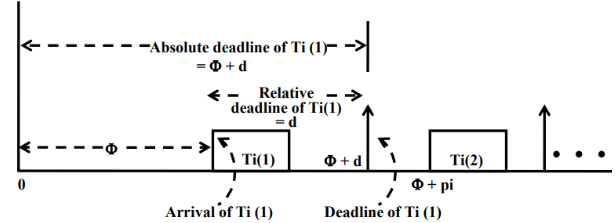
An example for the rhythmic task and periodic task work flow is given below
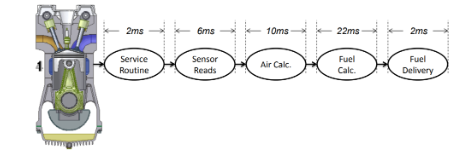
Here, we see that the computational repeats periodically, and there found a relationship between physical piston and engine speed where the engine speed is not considered to be constant
The utilization rate for rhythmic tasks are calculated by using the formula given below

Where represents CPU demand and represents period for a specific CPS at state Vs
The minimum flexion point lies in the range
Here, we see that
Here, the maximum execution time for the engine task for the engine from question 2 in steady state is 180 ms and the maximum execution time for the engine task for the engine from question 2 in steady state is 110 ms
ENDLESS SUPPORT IN THE ASSIGNMENTS WRITING SERVICE- YOU GET REVISED OR MODIFIED WORK TILL YOU ARE SATISFIED WITH OUR ONLINE ASSIGNMENT HELP SERVICES!
Question 5
Utilization test
The minimum utilization case is
Thus, we have
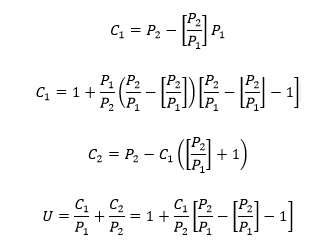
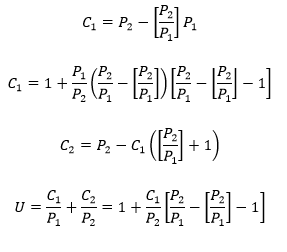
New Schedulability test
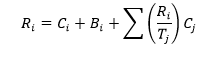
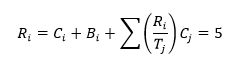
The new schedulability test is performed using the relation given below
Generally, the task with the minimal time period is assigned with highest priority and it is executed first
Schedulability check: 2/4 + 4/8 = 0.5 + 0.5 = 1.0 > 2(√2 -1) = 0. 82
EXPERTSMIND HELP STUDENTS TO WRITE QUALITY ASSIGNMENTS AT LOW COST!
Question 6
A system is said to be schedulable when we found that every thread always meets its deadline. In our study, it is found that the worst case execution time of the engine task is 4 ms
Here, we see that j ? hp (i)
Thus, we see that
Thus, we see that the periodic tasks do not meet its deadline and therefore it should not be schedulable system
The minimum flexion point lies in the range
Thus, we see that the maximum computation time allowed for the system to be schedulable is 110 ms
The new schedulability test is performed using the relation given below
RMS schedulability properties can be analyzed; rich theory exists and it is widely used in practice. If the computation time of the engine task is constant, then it is seen that the system schedulable during and after acceleration
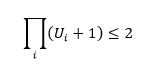
If
Then, we can say that the task is schedulable. Here, we see that
Task set: {(2,5),(4,7)}
U = 2/5 + 4/7= 34/35 ~ 0.97
Thus, we can say that the task is schedulable
GET GUARANTEED SATISFACTION OR MONEY BACK UNDER ONLINE ASSIGNMENT HELP SERVICE OF EXPERTSMINDS.COM – ORDER TODAY NEW COPY OF THIS ASSIGNMENT!