MOST RELIABLE AND TRUSTWORTHY CO-ACTIVE LEARNING FOR MULTIPLE ROBOT SEARCH AND COVERAGE PROJECT ASSIGNMENT HELP & HOMEWORK WRITING SERVICES AT YOUR DOORSTEPS!
Co-Active Learning for Multiple Robot Search and Coverage Project Assignment
Question: Prepare a Research Project on Co-active learning for multi robot search and coverage
Solution:
1. Abstract
This study has been conducted in order to evaluate the effectiveness of using coactive learning for robotic search and coverage processes. The study presents a detailed evaluation of various operations involving robotics processes and the methods by which coactive learning can be achieved. The various algorithms and learning processes that can be used have been presented within the study. The study has been conducted in the following systematic process:
This section can be stated as the abstract for the study
Section 2 deals with the introduction section of the study and presents information regarding the effectiveness of robotic search and coverage. It presents a brief introduction on the topic, a background and rationale for the study. Various aims and objectives of the study have also been presented in details.
Section 3 focuses on the background and literature review for the study and presents information regarding a variety of factors such as theories and models involved, algorithmic processes, learning methods and the effects on coactive learning on organisational operations.
Section 4 deals with the research gap and presents information regarding new developments and changes. It presents a brief overview on information collected regarding this topic from past researches and the information provided via this research.
Section 5 involves the research questions that have been developed based on the objectives presented in details within the study.
Section 6 focuses on presenting various methodologies used in order to conduct the study. Additionally, it also presents a detailed analysis and information regarding the knowledge and ideas gained from the study based on the analysis results.
Section 7 presents detailed information regarding the importance of the research in terms of organisations and communities.
Section 8 focuses on presenting the concluding perceptions gained by conducting the study.
ENROL WITH CO-ACTIVE LEARNING FOR MULTIPLE ROBOT SEARCH AND COVERAGE PROJECT ASSIGNMENT HELP AND HOMEWORK WRITING SERVICES OF EXPERTSMINDS.COM AND GET BETTER RESULTS IN CO-ACTIVE LEARNING FOR MULTIPLE ROBOT SEARCH AND COVERAGE PROJECT ASSIGNMENTS!
2. Introduction
Coactive learning in robotics is the interaction model between a robot and a human being. The use of this model is highly effective in ensuring that humans and robots can work and coexist together in an efficient manner. The robots can utilise neural network programming in order to learn about various methods by which humans conduct a variety of activities. The robots can then utilise these methods in order to achieve the necessary goals in regards to a certain issue or project. Additionally, the robots can also use supervised learning processes in order to learn about new ideologies and methods to deal with a situation with the use of IoTs. This method can help the robots to provide insights on various efficient methods that may be used in certain situations which can help humans learn in a more efficient manner. Therefore, it can be stated that these processes can lead to significant improvements in operations for both humans and robots.
In coactive learning, the participants share a common goal of yielding maximum productivity. The nature of interaction initiated by a user where a command is issued and the user receives a structured response. The response is interpreted to provide feedback. This research project identifies the coactive learning methods of robots for helping mankind. The use of co-active learning is an important aspect of the research due to the fact that it can help in improving the performances of both humans as well as robots. Additionally, the use of these co-active learning processes can also lead to serious improvements in search and coverage processes. Proper achievement of goals in these processes can be ensured with the use of improved machine learning technologies. These machine learning technologies involve the use of a variety of algorithms that can be efficient in improving the operations of various systems. This study presents information various learning methods and efficient algorithms that can lead to better performances of the system.
Robots are built to help human beings by reducing environmental fluxions or interpret complex data. Thus robots are executed with the help of coactive learning methods. However, it has been noted from the previous studies that the popular robot programming methods include teaching pendant, demonstration teaching or kinetic teaching and offline programming (Somers and Hollinger, 2015). These methods are popularly known for not requiring any punched paper strips. On the interaction of robotic vehicles with humans, it is assumed that the Robot possesses a clear understanding of the goals. For instance, robotic action is supposed to mimic human activities. Underwater robots can be programmed for scientific monitoring. Here the robot navigates the surrounding environment working as a human scientist.
The major purpose of the research is to identify the coactive learning methods. A few constraints looked by the researchers in the previous studies that made it hard to locate an adequate measure of issues for this subject. Another impediment was the absence of profundity in discussion due to absence of involvement in the field. The issue is a hypothesis of the Team Orienteering issue (TOM) contain a ton of areasfor the experts to explore. Thus this research has applied approaches that would make robotics simpler by overcoming the obstacles. For example, the cost of searching place can be diminished by utilizing the find and escape activity with the joined group of other robots. The development of the other robots can be found in the sweep coverage. The evaluation of the area can easily be finished in a solitary pass by opting the sweep coverage. Handling multiple robotic systems is difficult since the number of software operating them is more thus the rationale of the research is to make it effective using coactive learning paradigm.
Creating automation from its source to the destination is the major aim of this study. This research aims at adapting the algorithm of coactive learning that helps the researcher to learn the preferences of a human who employs his skills in a robotic path. The researcher plans and collects evidence for interpreting data. The programmed algorithm helps the researcher to analyze some paths that will bring the success of the research. The path will exactly mimic human action. The research will implement different methods of collective learning aligning theories and concepts. The theoretical concepts assume optimal feedback that has not been experimented on humans.
The research study is very significant since it has led to progress in several fields where interaction technique of coactive learning gives ascent in fields such as business, information, environment, and society so that improvements in these areas are viable. The study has outlined a few elements after conducting the research; it says that a single robot is enabling to modify itself in the interaction. Any single robot equipped operators are capable of dealing with own task in an individual account. The robots are equipped with different sensors which are again operated by some mechanism by the intelligent control system. Performance productivity is stronger compared to the multi-robot system. The research study is also able to address some of the gaps from its previous research, for instance, the researcher has tried to accomplish exploratory research in adequate time.
Coactive learning thus helps in solving team orienting problem. The researcher has used greedy algorithm for addressing complex problems. Robot location has been traced with the help of auction planning. The method of coactive learning has been able to resolve the queries of the user. The algorithm operates its action by solving TOP in order to locate the shortest route at random places involving minimal cost. Greedy algorithm is used to learn expert preference making the performance faster and cost-effective. The user can get accurate locations by calculating cost functions. Cost and stimulation functions diminish hindrances during data transfer among robots.
24/7 AVAILABILITY OF TRUSTED CO-ACTIVE LEARNING FOR MULTIPLE ROBOT SEARCH AND COVERAGE PROJECT ASSIGNMENT WRITERS! ORDER ASSIGNMENTS FOR BETTER RESULTS!
3. Background and Literature Review
3.1 Introduction
In the modern contemporary world, use of robot has significantly increased to handle various distinct possibilities and environmental fluctuation while implicating systematic empirical framework of investigation and innovative approaches to identify deceptive involvements. Constructive algorithm and specific paradigm sets various controlling factors within robotic search to maximize search results and performative activities of robots. The execution process of the robots while following predetermined properties of define algorithm can be enhanced by implicating standard co-active learning factors. Effective co-active learning process allows understanding various operational segments and models of machine use while adapting machine learning process in an efficient, robust and unobtrusive way.
3.3 Background
Use of robotic search and rescue has gradually increasing within the modern world. This systematic usage of robots allows incorporating effective efficiency and accountability while searching for its functional perspectives. Multiple robotic system is an inner addition in modernize search operations as it allows to save time and energy while incorporating accuracy and accountability within its operational movements (Zhao et al. 2016). Robotic functional coverage refers to an area of function that confines challenges and obstacles to employ human interactions to ensure effective coverage planning (Romero-Vivas et al. 2015). Systematic algorithm of multiple robotic systems allows implicating effective search process to evaluate general idea and to overdo environmental challenges. Co-active learning functionalities is an influential aspect in order to amplify performance of multiple robotic system. Combined efforts of humans and machines can be an effective initiative to resolve various optimal challenges and environmental obstacles while adapting effective machine learning and innovative approaches in a cost effective way.
3.4 Models
Impact of robotic devices are increasing daily basis to control and execute difficulties and functional movements of any aspects of mankind. In order to develop and facilitate mankind application of multiple robotic searches has been implemented to reduce complexity and human errors. However, implementation of robotic devices is required to control by human beings with efficient algorithm and effective paradigm to enhance the success of robotic actions (Habib, 2017). Multiple applications are available nowadays to incorporate such facilities while providing Programmable Logical Controller (PLC). To ensure effective robotic search and repetitive actions, various types of model has been evolved within technological industry to cope with numerous difficulties and environmental challenges.
Manipulation Robotic System
Manipulation Robotic System is designed to operate its objectives by pick and place. Once the area is fixed, manipulation robotic system can work efficiently without human interactions to Control the motion of functions. Need of continuous sense and direction are not essential to operate such functionalities. In order to ensure productive robotic search, certainty and availability of control mechanisms are necessary to install within robotic devices (Joseph et al. 2015). However, dynamic non-prehensile manipulation system can face challenges to control high speed and sensitive function but this robotic system is efficient to control the object motions of specific functionality. Hybrid manipulation system is an effective alternative to install manipulation robotic system within robot search while focusing on contact modes such as objects, manipulator and environmental changes. Use of manipulation robotic system can be an effective initiative to implicate in environmental search and coverage.
Mobile Robotic System
Mobile robotic system confines autonomous applications and various sensors to control its navigation while incorporating empirical framework of algorithm and configurable computing system (Ding et al. 2017). It is an inevitable innovation of modern century which has significant implications to facilitate mankind. It uses locomotive activities to organize its functional movements. This autonomous application is designed to navigate changes in environments without human interference and electromechanical guidance devices. Mobile robotic system confines a set of technological tools which includes a controller, control software, various sensors and actuators. As per Dörfler et al. (2016), this system uses microprocessor and personal computer while assembling software and sensors to avoid collision, triangulation ranging and physical positioning. Various different sectors such as security system, military function and industrial area are significantly blessed with its services. In addition, these robotic devices are designed to implicate of co-active learning components to enhance its accuracy and accountability. Environmental disasters, remote search and rescue plans can be performed by mobile robotic system as it identifies the changes in environments without human interference.
3.5 Effects of co-active learning in robotic search and coverage
Coactive learning system has enormous impacts of robotic search programs as it allows to control and measure network planning pathways and provides learning based solutions to probabilistic pathways for multiple robotic systems in the workplace. Effective coactive learning process also helps to control functional specifications of robots and innovative approaches to initiate robot based search (Shivaswamy and Joachims, 2015). Various effective usages of coactive learning are mentioned below.
Algorithm
Each robotic activity is controlled by specific algorithm and paradigm of data management. Effective coactive learning allows humans to create effective patterns of algorithm to assign specific work and tasks by the robotic system to execute effective performance while considering created bids. This effective learning process also helps to set significant bids to the bidders. Robots follow such bids and perform as per the codes installed within the system (Joseph et al. 2015). This algorithm framework upholds various distinct values created by humans and provides necessary guidelines, patterns and area of execution.
Action based informative path planning
Multiple robotic system confines an action based informative path planning which has been installed within the devices to exaggerate premeditated planning within specific area of action. The pattern and location are decided by the human. Influential aspects of coactive learning process allow the robots to follow informative pathway to enhance accuracy, efficiency and coverage tasks. In addition, coactive learning process helps to set coverage structure and route designing procedures to operate rescue missions without wastage of energy and cost.
Controlling Hostile Environment
Use of multiple robotic systems is an inevitable part to control hostile and adversarial environment. Various tasks such as underwater exploitation, aerial surveying and disaster rescue operations can be effectively managed by implementing coactive learning components. Collaborative efforts of human and machine can be an asset to enhance coverage locations.
4. Research Gap
This systematic research intends to discover various distinct possibilities and acceptability of multiple robotic systems in search and coverage aspects. The associated models and implications are mentioned here to amplify research objectives and research questions. Due to unavailability of existing research regarding robotic search and coverage, various research gaps has been occurred due to insufficient time schedule and first hand data sources. Although, provided algorithms are programmed to solve complex and challenging problems alongside models are mentioned to evaluate effective usage of the available robotics. However, this study intends to highlight the significance of coactive learning and its implications within robotic search and coverage projects.
5. Research questions
The objectives of the research are:
• To analyze the algorithm that can be used to search a location to locate the targets fastest efficiently using the energy
• To integrate the algorithm to a co-active learning method and to analyze whether the system and algorithm proposed always be the most effective way to reach a target
Based on the above mentioned research objectives, the following questions can be framed:
• Which algorithm can be used to search a location to locate the targets fastest efficiently using the energy used in the problem?
• How to integrate the algorithm to co-active learning and will the system and algorithm proposed always be the most effective way to reach the target?
6. Research Methodology
6.1 Research Methodology 1
6.1.1 Research Philosophy
In order to carry out the research in more efficient and innovative way, the researcher needs to implement specific research philosophies in multiple robotic context. Research philosophy confines a set of systematic beliefs that concerns about the nature of realistic identification of the specific content background. This stage includes the definition of the nature of ideas and knowledge (Lawande et al. 2016). A potential research philosophy helps to create certain assumptions that justifies the patterns of the research and provide proper guidance to undertake research project. Research philosophies can be segmented based on collective objectives of the context and the possible ways to use those philosophies for future development of robotic involvement. The selection of the research philosophies depend on the types of information that the research project aims to deliver. Inherited assumptions within a research process can be justified as it develops the essentiality of the philosophical approaches to upgrade used methodology (Cairns et a. 2016).
Research philosophies are categorized in two main parts which includes positivism and constructivism to set an empirical framework for analytical views. Many philosophers explain this framework separately but the utmost values of assumptions confines the same foundation as it broadly describes the conducting procedure in similar pathways.
Positivism confines the comparative independence of the existing reality within robotic system. Positivism encloses the meaning of the phenomenon that already exists within wide perspectives. Positivism is significantly used research philosophy that incorporates information and statistical values as the foundation of the research project. As suggested by Sinha et al (2018), positivism philosophy shows the available realistic values which enhance validity and objectivity in the research. Post positivism is also a fundamental philosophy which challenges and amends the efficiency of positivism to create efficient research study. Post positivism consists of background, theories, values and knowledge that states as a foundation for significant attachment within the project.
Constructionism refers to the social phenomenon that can be described by each individual differently and it is impossible to presume interpreted observations. In order to emphasize the research field, a researcher requires implementing interpretivism to justify the points mentioned by positivism philosophy as it upholds the opposite role of positivism philosophy along with comparative interpretation within different studies. Realism is also effective philosophy for further justification of the research methodology. This study implicates positivism philosophy as a reference to evaluate effectiveness of co-active learning in multiple robotic searches.
NO PLAGIARISM POLICY - ORDER NEW CO-ACTIVE LEARNING FOR MULTIPLE ROBOT SEARCH AND COVERAGE PROJECT ASSIGNMENT & GET WELL WRITTEN SOLUTIONS DOCUMENTS WITH FREE TURNTIN REPORT!
6.1.2 Research Approaches
Research approach is inadequate to use within a research project which is useful to measure the assumptions that has taken into account to obtain detailed information about the context. There are two types of approach that requires highlighting,
Deductive approach
Deductive approach provides the hypothesis of an already existing theory and formulates the relevant approach to improve justification. This approach is appropriate for those situations where research paper is aimed weather the existing research study meets the expectations of the observed phenomenon. Deductive approach can be used in positivist approach which allows the formulation of hypotheses and analysis of expected results probability. In addition, deductive approach is also effective to describe the significance of the relationship between concepts and variables. Deductive approach creates two certain procedures to ensure productivity such as general and particular approach. Deductive approach is designed to develop conceptual theory and knowledge of the targeted topic and gain knowledge on specific portion of it which helps to investigate speculations and followed models within the systematic framework of the research. Deductive approach also helps to generalize the topic and allows growing on specific portion (Alajrami and Abu-Naser, 2018).
Inductive approach
Inductive approach is developed to discuss the theory from a special perspective to the general view of the observation. In this process, observation plays as the starting cornerstone for the researcher to move into more general perspectives. This does not consist of any specific framework that initially includes data and findings. Inductive approach is directly involved with the creation of new theories along perfect data support. This approach is mostly used in qualitative research as it analyses collective data firstly then evaluate it into a more constructive way. This process also can be useful for positivist methodology while analyzing available data and inform the generation of results. Inductive approach of research helps to organize potentially developed Models and theories while finding appropriate patterns within the same environment (Mayer, 2015).
This research paper uses deductive approach to meet the requirements of the research project regarding the efficiency of coactive learning in robotic systems.
6.1.3 Research Design
During achievements of specific research objectives, strategic designs are essential to implement as it upholds productivity as recommended. Research design is developed to provide necessary procedure information to conduct the project seamlessly. This systematic framework of effective methodology consists of the considerations of the selected respondents along with procedure of analyzing data (Creswell and Creswell, 2017). Research design also confines several important characteristics including descriptive, explanatory and exploratory version of the constructive framework. Descriptive research design reflects the experience of the selective respondents. Meanwhile, it is part of ethnographic study which also includes quantitative framework for further development within the concept.
Explanatory research design includes a thematic view of the characteristics of a segment of people or social phenomena. This design can be developed while using quantitative framework where one variable influences other and reforms can be established (Creswell and Creswell, 2017). Various forms of the mentioned variables can be connected effectively while conducting the research through explanatory research design. Explanatory research design also helps the researcher to identify the issues and influencing factors within multiple robotic search and coverage context. Descriptive research design encloses several occurring key aspects such as where, why, how, what's or the research which provides necessary information. Meanwhile, descriptive design only provides information as this process is unable to resolve issues. In the meantime, exploratory research design provides a broad view of relatively selected areas within segments of the research which highlights the areas that require further formulaic research.
6.1.4 Research Strategies
This section describes the potential strategies that require developing for fundamental foundation of the systematic research project. The research strategies depend on the researcher how the study intended to deliver its core values. An efficient research strategy is the fundamental key aspect that requires implementing by the researcher to create an authentic research paper. Research strategy is categorized in different versions such as experimental research, case study research, action research, surveys, interviews and even published journals (Mayer, 2015). Experimental research encloses the potential strategies that help to create a research pathway that only includes the values of an experiment which is against the expected results. Experimental research has become more efficient and productive as helps different types of contents to be discussed with more solidity. It also reduces the affecting factors that impacts research process.
This strategy highlights the relationship between several decisive factors and examined efficiently and justified against the expected outcomes from research paper. Meanwhile, action research is designed as a realistic approach to a mentioned research issue within the research conducting process. This process prioritizes simultaneous examinations to establish as a potential operation strategy (Mayer, 2015). This strategy includes systematic process, known as reflective practice which allows professional practice. This form of research gain well responds from various professional sectors such as teaching and nursing profession. Case study is assessment process that identifies the specific features and provides solution to a specific nature of any context. Mostly finance sector uses this process while comparing the experiences of relevant companies. Survey and interviews are mainly conducted to collect efficient data within the economical aspects. As per Schwartz et al. (2017), research strategy contains several thought process and efforts of the researcher which works as a foundation of the research project. In the given scenario, experimental research along action and data collective research are used to describe the key features behind the adaptability of multiple robotic search and coverage. (Saunders et al, 2007).
6.1.5 Data Analysis
Quantitative Data collection
Quantitative data collection method refers to an approach that focuses on the variety of quantitative data. It consists of several numbers of accepted analyzed standards for validity. The process focused to gather large number of respondents which is essential to build statistically significant results. This process is informed by positivism philosophy but it can be useful for investigation to a wide range of social phenomenon. Quantitative data collection method can be an effective methodology for multiple robotic search and coverage as functional system site consists millions of movements every year which allows interacting with more respondents. Statistical methods of analysis and quantitative techniques help to implement quantitative methodology within a research project (Saunders et al. 2007).
Qualitative Data collection
Qualitative data collection method is directly involved with constructivist paradigm. This effective process helps the researcher to avoid imposing self perceptions related to social phenomena over the respondents. The fundamental objective is to investigate the opinions of the respondents over the same reality of the content. This methodology is framed by the views of respondents rather than the views of the researcher. Qualitative data collection method consists with the opinions, reasons and the motivations of the respondents to understand the pattern of social phenomena. This process can be conducted through individual interviews or text where the response should be open. In order to describe the significance improvement of multiple robotic search and coverage, interviews of the authority can be a driving force for the researcher to establish strong research context.
6.1.6 Data Collection Sources
Primary Data collection method
Primary data collection method includes several first hand data sources. This process also includes historical first hand sources or any other firsthand sources like direct interviews or survey of the selective respondents. The researcher also can use statistical collection and derived data from other researchers to upgrade the quality of the research work. Primary data collection method is the most influential aspect as it provides essential data to outline the research significantly. Primary data collection method consists with human interactions. Both quantitative and qualitative or mixed methodology can be used to benefit the process. This data collection method is mainly based on the several first hand data sources such as individual interviews, surveys, poll reports and questionnaires to different authorities connected to robotic system (Phiri, 2016).
Secondary data collection method
Secondary data collection method mainly lies on the derived data by other researchers within the same environment of the context. One researcher can constitute research work while implementing secondary data sources conducted by other researchers. Secondary data collection method is included with the available information about the context in form of journal, news reports, magazines and books. This study includes both methods of data collection but quantitative approach helps to describe related topics of multiple robotic search and coverage and its functional aspects as it saves time to conduct the exploitations (Croes et al. 2018).
This study uses both primary and secondary data collection to evaluate its efficiency.
The Primary sources had proved that a new term had been emerged regarding the robotics impact on workplace; the term is "jobless recovery". It also proved that despite the huge increase of robots America had almost half the robots than Germany which is the third largest robot manufacturer and robot employer in the world after Japan and Korea. The foreign companies nowadays are recruiting fewer employees for a short period of time and then recess for a new group of employees. The growth of companies had made the competitive market strong and in this busy market the main factor is time management and to sort out some more time the companies had invested on robotic employers. Whereas, the secondary sources that is books, magazines had provided a creative source about robotics in modern work place. It had proved that the service sectors of different companies had already indulged in recruiting displaced people to strengthen their economy. Further research had highlighted that, these automated robotic systems had made the human employment market slogged but increased the output rate. This also increases production and induce the unit price rate helping the company to achieve new heights.
6.1.7 Interview Schedule
Interview schedule is necessary to conduct as it confines corresponding response of the interviewer. An interview schedule allows incorporating important opinions of stakeholders and important audiences. Two types of interviews are mainly incorporated within healthcare sector such as in depth interview schedule and structured interview schedule. In depth interview consists of various indications that allows interviewees to know the purpose of the interview. This process also allows to increase the likelihood of collecting specific data both quantitative and qualitative elements. Interviews of stakeholders, doctors and nurses are mainly conducted here. Structured interview schedule follows the pattern of surveys and questionnaires as it provides a wide range of quantitative database. Interviewing patients, families and in house subordinates mainly incorporated here.
6.1.8 Study Participants
The Study Participants may be mentioned to as participant, study subject and managers. Study participants safety and privacy should be defended completely by the trial. To complete a research study the entire team depends on a dedicated and educated participant. Consent with the study regime and advance information of potential adverse events is necessary for the participant's safety and the integrity of the trial.
6.1.9 Ethical Consideration
The collected data about the system aspects of multiple robotic search and coverage, a house of thematic form of art is not used for any commercial purpose or to serve any preferences towards any organization. Available information related to multiple robotic searches and coverage would not be manipulated to discuss the recent scenario of functional System. However, only voluntary responses would be taken for reference resources.
6.1.10 Timeline
[Refer to Appendix]
ENDLESS SUPPORT IN CO-ACTIVE LEARNING FOR MULTIPLE ROBOT SEARCH AND COVERAGE PROJECT ASSIGNMENTS WRITING SERVICES - YOU GET REVISED OR MODIFIED WORK TILL YOU ARE SATISFIED WITH OUR CO-ACTIVE LEARNING FOR MULTIPLE ROBOT SEARCH AND COVERAGE PROJECT ASSIGNMENT HELP SERVICES!
6.2 Research Methodology 2
6.2.1 Proposed solution
The most effective solution that can be proposed in order to gain significant knowledge in regards to the use of coactive learning is the use of a survey based on the views of managers regarding the use of robots in daily activities. The survey can help to present insights regarding their views on how robots can be used effectively within the organisation and the effect of this utilisation of robots for organisational gains. The processes by which robots and humans and coexist and learn from each other have also been analysed and presented.
6.2.2 Quantitative Data Analysis and Results
1. What is your age?
|
Responses
|
No. Of Respondents
|
Total Respondents
|
Percentage
|
|
Exactly 25 years
|
8
|
40
|
20
|
|
25-30 years
|
12
|
40
|
30
|
|
30-40 years
|
9
|
40
|
23
|
|
40-50 years
|
7
|
40
|
18
|
|
50-60 years
|
4
|
40
|
10
|
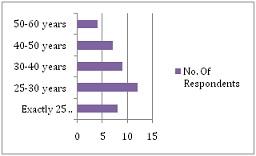
Figure 1: What is Your Age?
Implication
Above given table shows that 40 respondents responded properly to the question asked about their age. It can be seen that respondents above the age of 30 years are more experienced and they have better knowledge about the benefit of robotics and its impact over organizational performance. Respondents with age 25 to 30 years have joined the organizations recently and even if they are the managers, they are with lesser experiences. People with more age are having more knowledge about robotics and its advantages related to organizational operations. However respondents with 50 to 60 years age are having more experience as a manager but are not dealing effectively with robots. In other words, those respondents are not accustomed with the utilization of robots and having little knowledge about their impact over the performance of the company. Hence it can be said that respondents with age 30 to 50 years have the best knowledge about robot and are completely aware of its impact over organizational performance.
2. What is your Gender?
|
Responses
|
No. of Respondents
|
Total Respondents
|
Percentage
|
|
Male
|
13
|
40
|
33
|
|
Female
|
20
|
40
|
50
|
|
Prefer not to reveal
|
7
|
40
|
17
|
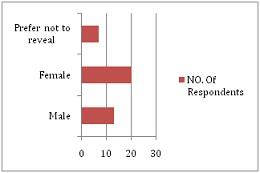
Figure 2: What is Your Gender?
Implications
40 respondents replied to the above question to be used in the given analysis. The question is mainly asked to know the gender of the respondents and from the table it is clear that 7 out of 40 respondents did not want to respond to this particular question. From the analysis it is clear that 33 of them responded directly to the question and it can be seen that 13 respondents are male and 20 of them are female. Thus it can be concluded from the table that 13 male and 20 female managers cooperated properly in the survey to collect proper record for the given analysis. It is mostly seen that managers are male but from the analysis it is clear that female managers are more than male and it can be also said that other male managers preferred not to reveal their proper identity. Nowadays most organizations are hiring managers based upon their knowledge and thus females are also preferred mostly as they are seeking management knowledge in particular. Most of them are also having knowledge about robotics ad how their presence is actually helping the organizations. It is also clear that those not revealing their gender are also connected with the functions of robotics.
3. How long have you been working in the Organization?
|
Responses
|
No. of Respondents
|
Total Respondents
|
Percentage
|
|
1-5 years
|
8
|
40
|
20
|
|
5-10 years
|
18
|
40
|
45
|
|
10-15 years
|
5
|
40
|
13
|
|
15-25 years
|
6
|
40
|
15
|
|
25-30 years
|
4
|
40
|
10
|
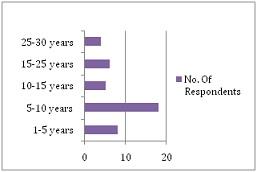
Figure 3: How long have you been working in the Organization?
Implication
The question is mainly asked to 40 managers of the respective organizations to know about their working experiences. 8 of them are working in their organizations from 1-5 years and they mostly believe that robotics is helping the organizations to improve their performance majorly. They are working in the organizations not more than 5 years and thus they do not have much knowledge about robot's impact over the organization but from their personal experience they focused on positive impacts of robotics. 4 of them are having experience more than 25 years but they did not support robots much and it can be concluded that they are biased or they are not having enough knowledge to utilize such a machine for business operations. It can be seen that 18 of them are having knowledge 5-10 years and those respondents gave enough information about robot's contribution to improve business performance. According to the respondents as robots are getting utilized in the companies, production is becoming easier and most of the tasks can be done within a much shorter time frame. As a result overall production is increasing and business performance is also improving day by day.
4. Do you think Robotics is having positive impact over the organization?
|
Responses
|
No of Respondents
|
Total Respondents
|
Percentage
|
|
Strongly Agree
|
10
|
40
|
25
|
|
Agree
|
16
|
40
|
40
|
|
Neutral
|
5
|
40
|
13
|
|
Disagree
|
6
|
40
|
15
|
|
Strongly Disagree
|
3
|
40
|
7
|
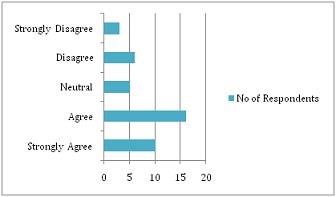
Figure 4: Do you think robotics is having positive impact over organizations?
Implications
The table clearly shows that 40 respondents answered directly to the question asked about the positive impact of robotics. It is expected that most of them working within the organization have enough knowledge related to robotics and how it is helping the companies. It is seen that 10 of them completely agreed with the positive impact and is sure organizational performance is improving because of robotics. 16 of them agreed with but were not sure about all the benefits that are provided by robotics as they are working within the organizations not more than 15 years. 5 of them remained neutral and felt not to answer anything in favour or against the topic but it is seen that 3 of them completely disagreed. Those three of them are highly experienced but their response seems that they are not in favour of robotics and feel performance can be improved with the help of tasks manually done by the staffs or with the help of machineries used within the organization. Hence it can be said that those with 10 years of experiences are more in support of robotics as they have good knowledge about its positive impact and also agree that organizations are getting benefited majorly.
5. Do you think production quality is improving due to robotics?
|
Responses
|
No of Respondents
|
Total Respondents
|
Percentage
|
|
Yes
|
26
|
40
|
65
|
|
Neutral
|
8
|
40
|
20
|
|
No
|
6
|
40
|
15
|
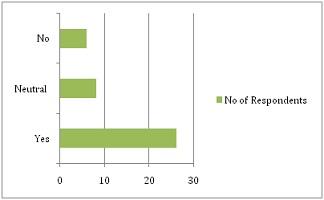
Figure 5: Do you think production quality is improving due to robotics?
Implication
The table clearly shows the response of 40 respondents regarding the improvement in production of the companies. 26 of them responded in favour of the question and 6 of them disagreed. 6 of them are experienced workers who are working here for more than 15 years and it can be said that they are getting biased while answering. Such biasness mostly arise when people are not fully aware of the topic such as these respondents have hardly any knowledge about the utilization of robotics. However 8 of them remained neutral and it can be concluded that they were not interested to reveal information related to their organizations. Mostly robotics is useful and is helping the organizations to grow successfully and it is also seen production of most of the companies are improving effectively. Thus it can be said those who remained neutral or did not agree it means they are not cooperating to give relevant answers. Majority of them answered in favour of the question and thus it is already clear that robotics is helping organizations majorly.
6. Is robotics improving service quality of the employees? Especially managers.
|
Responses
|
No of Respondents
|
Total Respondents
|
Percentage
|
|
Yes
|
24
|
40
|
60
|
|
Neutral
|
6
|
40
|
15
|
|
No
|
10
|
40
|
25
|
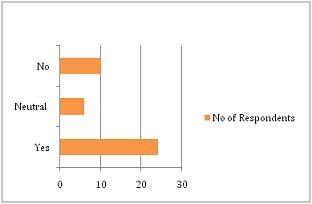
Figure 6: Is Robotics improving Service quality of Managers?
Implication
The answers received in response to the question asked shows that robotics is actually helping the managers improve their overall productivity. It is very necessary to improve efficiency and productivity of the employees for improving overall growth of the companies and such productivity is improved with the help of robotics. 24 of them responded to the question and it shows that those managers agreed their service improved with the help of robotics and their productivity is also helping the organization grow successfully. However few of them remained silent and it shows they are not interested to talk about their productivities and many of them said it is not helpful. Those who disagreed it mean they are not familiar with robotics and do not understand how to use it to improve their quality in particular. Overall response shows robotics is also helpful for the employees to complete their task within shorter time period and is improving their working capabilities in particular. Such analysis will be helpful for other employees as well who can take help from robotics to improve their quality and can serve the companies in a better way.
7. What are the ways of robotics that are mainly helping organizations?
|
Responses
|
No of Respondents
|
Total Respondents
|
Percentage
|
|
Different job service
|
8
|
40
|
20
|
|
Common Understanding
|
7
|
40
|
18
|
|
Effective communication and Interaction
|
16
|
40
|
40
|
|
Mutual Backup
|
9
|
40
|
22
|
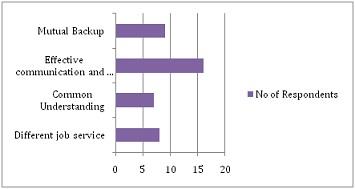
Figure 7: what are the ways of robotics that are mainly helping the organizations?
Implication
The table shows the various ways of robotics that are followed by the organizations to improve their growth in particular. For example employees need to keep backups of the important files of the companies and sometimes it become difficult to keep all backups. In such situation mutual backup plays an important role where robotics is helping the employees to keep all necessary records. Proper communication and interaction is also helpful for the organizations to perform effectively and such communication is made possible by robotics in particular. Due to proper communications employees are working effectively and their efficiency is improving and thus overall performance of the organizations is improving majorly. Respondents mostly answered in favour of effective communication and interaction that is playing a major role in organizational improvement. Different job services are also available with the help of robotics but many of them did not respond in its favour. Sometimes the managers are not interested to talk about their job structure and common understanding within the organization and thus responses are not proper or many of them did not want to cooperate to answer to such questions.
8. Which are the issues faced by the organizations related to Robotics?
|
Responses
|
No of Respondents
|
Total respondents
|
Percentage
|
|
Increasing cost
|
26
|
40
|
65
|
|
Taking away job of employees
|
9
|
40
|
23
|
|
Bad impact over environment
|
5
|
40
|
12
|
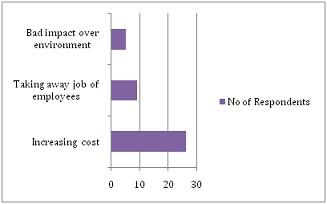
Figure 8: What are the robotic issues affecting the organization?
Implication
The table mainly tried to draw the attention on negative impacts of robotics over organizations. Positive impacts are already highlighted with various questions and answers received from the respondents. However it is also seen that various issues are affecting the organizations mostly and such issues are stopping various organizations to adopt robotics even when there are various advantages that are helping the organization to grow successfully. It is the objective of the organizations to reduce cost and increase profit in particular but robotics often involves higher cost. A lot of money is to be involved by the companies to use robotics successfully and such funds are not available to them. Most of the respondents spoke against robotics because of higher cost involved in its implementation and it is very necessary to introduce advanced methods so that costing can be reduced. Various employees are losing jobs as they are not able to adapt to such applications of robotics and often most of the tasks are done with the help of robotics and that is taking away jobs in various organizations. It is necessary to introduce training for the employees so that knowledge can be acquired and common understanding is always essential so that employees do not lose their jobs. Robotics is having negative impact over environment as well but no such relevant responses are received as only few of them gave their opinion regarding the impact over environment.
Survey Results and Conclusion
Based on the quantitative data analysis and its results, it was found that most of the respondents were female and belonged to the age group of 25 to 30 years. Therefore, it can be stated that they have experiences in this field and can provide with the necessary knowledge. Additionally, most of the respondents have been employed for around 5 to 10 years and thus have a significant amount of knowledge in regards to robotics and coactive learning processes. Most respondents agree that robotics have positive effects on organisations and a large number of people stated that robotics contribute to significant improvements in performances and production quality. It was found that robots have led to serious improvements in regards to service quality for employees and have also led to positive developments in regards to efficient communication and interactions within organisations. However, the increasing cost of utilising robots for operations is a prime concern for most organisations.
GET READYMADE CO-ACTIVE LEARNING FOR MULTIPLE ROBOT SEARCH AND COVERAGE PROJECT ASSIGNMENT SOLUTIONS - 100% PLAGIARISM FREE WORK DOCUMENT AT NOMINAL CHARGES!
6.2.3 Qualitative Analysis and Results
The qualitative analysis has been conducted by taking into account three respondents belonging to the board of directors within various IT based firms. The views of these respondents have been evaluated with the use of an interview process.
Q1. What are your views in regards to coactive learning?
|
Respondent 1
|
Respondent 2
|
Respondent 3
|
|
"The use of robotics is a highly innovative and futuristic process and needs to be incorporated in all organisations. The use of this process can help to improve performances of the entire system"
|
"The use of coactive learning in robotics can help use to allow humans and robots to work side by side and learn from each other in order to achieve various computing goals"
|
"Coactive learning can help to utilise a coordinated approach in order to achieve major goals for an organisation that cannot be achieved simply with either humans or robots"
|
Based on the information collected above, it can be stated that coactive learning is highly effective in ensuring the achievement of major goals for an organisation. This method can help robots to learn from humans and can also inspire humans to work efficiently. This process can allow humans and robots to coexist with each other in an efficient manner and can lead to significant changes in the development processes. It can lead to significant achievement of goals in regards to increased performances for the organisation and can help to provide high quality services for the organisation.
Q2. What kind of algorithm can be utilised in order to ensure effective coactive learning between robots and humans?
|
Respondent 1
|
Respondent 2
|
Respondent 3
|
|
"The supervised learning process may be used in order to allow robots to collect information in similar methods as an AI system. Information can be shared with the use of Internet of Things (IOTs)."
|
"T believe that it is better to manually provide required information to the robots in order to prevent it from going rogue. The development of a fully aware AI or VI can allow the system to go rogue."
|
"The use of supervised learning algorithms along with machine learning processes with the use of neural networks can have positive effects on new developments relating to the performances of the system"
|
As per the information collected from the views of respondents, it can be stated that the supervised learning processes are most effective in dealing with the problems. The use of supervised learning can allow the user to monitor the information collected and learned by the robot. Additionally, the use of this learning process can also help to prevent the robot from going rogue due to the collection of destructive information. As per one of the respondents, manual data feeds are most effective in preventing the robots from going rogue and can also allow it to learn effectively. Additionally, another respondent was also interested in the fact relating to the use of coactive learning in order to develop a coordinated approach between humans and machines. It was stated that the use of neural networks are most effective in this case in order to ensure that the robotics systems can learn in an efficient manner.
Interview Results and Conclusion
On the basis of the qualitative data analysis and its results, it was found that all the respondents feel that co-active learning is an important process to be used within an organisation in order to improve the performances of humans as well as robots. It was also stated that supervised learning methods could be utilised in order to ensure improved learning for the robots. Additionally, one of the respondents also stated that in order to prevent the robots from going rogue, it is better to manually input data for operations. However, this process requires a high amount of time and also does not help humans to learn from the robots.
6.2.4 Discussion of results
Based on the results gained from the study, it can be stated that the use of robots can be helpful in improving the speed and efficiency for various system operations. Additionally, the use of robots can also be highly significant in improving the performances of the organisation and can lead to significant positive effects on brand performances. The use of coactive learning was found to be a highly efficient process and can have positive effects in allowing both humans and robots to learn from each other. The use of IoT devices can be effective in allowing the robots to gain and collect information. However, the flow of information collected needs to be supervised. The robots operate on the basis of binary values of 1s and 0s. The coactive learning model can be utilised in order to ensure effective operations of the system. Based on this model both the human and learning algorithms have the same operational goal for obtaining results. The xt ∈ X is a search query observed in each round of the algorithm loop presented as t. It can be stated that yt ∈ Y is the function used by the human in order to learn the machine learning search query presented as xt ∈ X. Therefore, in this case, the utility function U (xt , yt) is unknown to the learning algorithm. The equation can thus be presented in the following process:
U(xt , yt) > U(xt , yt)
Information retrieval processes can be conducted with the use of the equation DCG@10(x, y) = P10 i=1 r(x,y[i]) log i+1 , where r(x, y[i]) is the relevance score of the i-th document in ranking y. The data was presented using a graphical view and has been presented as follows:
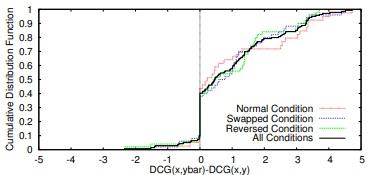
Based on the graph presented above, it can be stated that the cumulative distribution functions have been of significantly low values at -2 and has had a significant increase with the increase in positive values of the DCG(x,ybar)-DCG(x,y) axis. Therefore, it can be stated that the learning processes are highly proportionate to that of the information retrieval methods. The higher levels of information gained by the robots or humans can lead to better learning and increased efficiencies in performances.
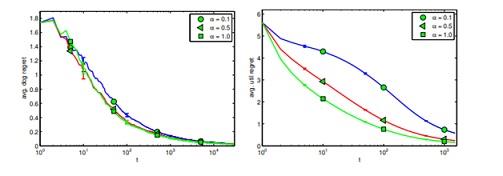
Strict informative feedbacks can be used in order to evaluate strong and weak feedbacks. It can help to keep track of regret values in regards to data collection. It was found that when the alpha base values are 01 and 0.5 the regret values are at the highest. However, in case of alpha value equal to 1, low regret values are observed. The alpha values indicate the level of information quality retrieved. Therefore, high quality information collected by either the human or robot can lead to significantly high levels of coactive learning.
7. Research Significance
This topic focuses on the use of robots, which are created to lower the hassle of the mankind and its significance in an organizational process. Robots help in saving important time to improve the productivity level of the job and the over-all performance, potentiality and sustainability. The co-active learning process help to boost different areas like human knowledge, society, environment and business etc and its prime goal is to grow in any particular field with proper utilization of resources and with proper interactional skills. This learning process helps to develop multiple algorithms and its process of creating multiple robots capable of doing one single job or different kinds of jobs at a short amount of time. This study is also significant to cultivate the reasons about the relationship between human behaviours with an important invention of the modern technology-robots. This study also helped us to dig in the reasons relating to the use and impact of robots on the performance of a reputed company. The most prolific reason behind the importance of robots is the working process of a robot which had reduced the human error level and help to work more efficiently with tremendous accuracy to achieve the goal of getting successful results. Any scientific inventions come with its own negative and positive impacts, similarly robots with its immense positive results also bring some negativity like- high maintenance and installation rates, loss of jobs and reduce opportunities relating to jobs, increased the rate of data breach and potential cyber security issues. But still the modern technology is depending very much on this creation because it can save time, maintains work efficiently and helped in developing a positive environment in the workplace.
8. Conclusion
The coactive learning methods use factors such as age, weight that again depends on environmental variables. The study will help the researcher to design an algorithm by collaborating between several robots. The collaborations are programmed by arranging the functions and other resources for coactive learning programs (Shivaswamy and Joachims, 2015). The structural program area relies on the system coverage for instance route problem can be solved by assisting the computation of many robots. The structure coverage is required to overcome the challenges occurred from disaster. The robotic functioning can be adjusted with the rescue functions for protecting human lives. Multi-robot information is employed to alter search function through the route designing procedure. Robots are made in dreary activities and it is constrained by the Programmable Logical Controller (PLC). The robotic arms are intended to make the monotonous activities that are customized for the robot (Jain et al. 2015). This comprises of the focal processor. Position factors are modified in the robot to make the non-redundant development of the robot.
HELPING STUDENTS TO WRITE QUALITY CO-ACTIVE LEARNING FOR MULTIPLE ROBOT SEARCH AND COVERAGE PROJECT ASSIGNMENT AT LOW COST!